Planning 模块:工具层权限门禁、TodoStore 状态机与执行自动化
关于 harness9
harness9 是一款 Local-First、轻量级、功能完备、生产可用的通用 Go Agent 框架。
⭐ Star 是对开源工作最直接的支持,欢迎提 Issue 和 PR。
TL;DR
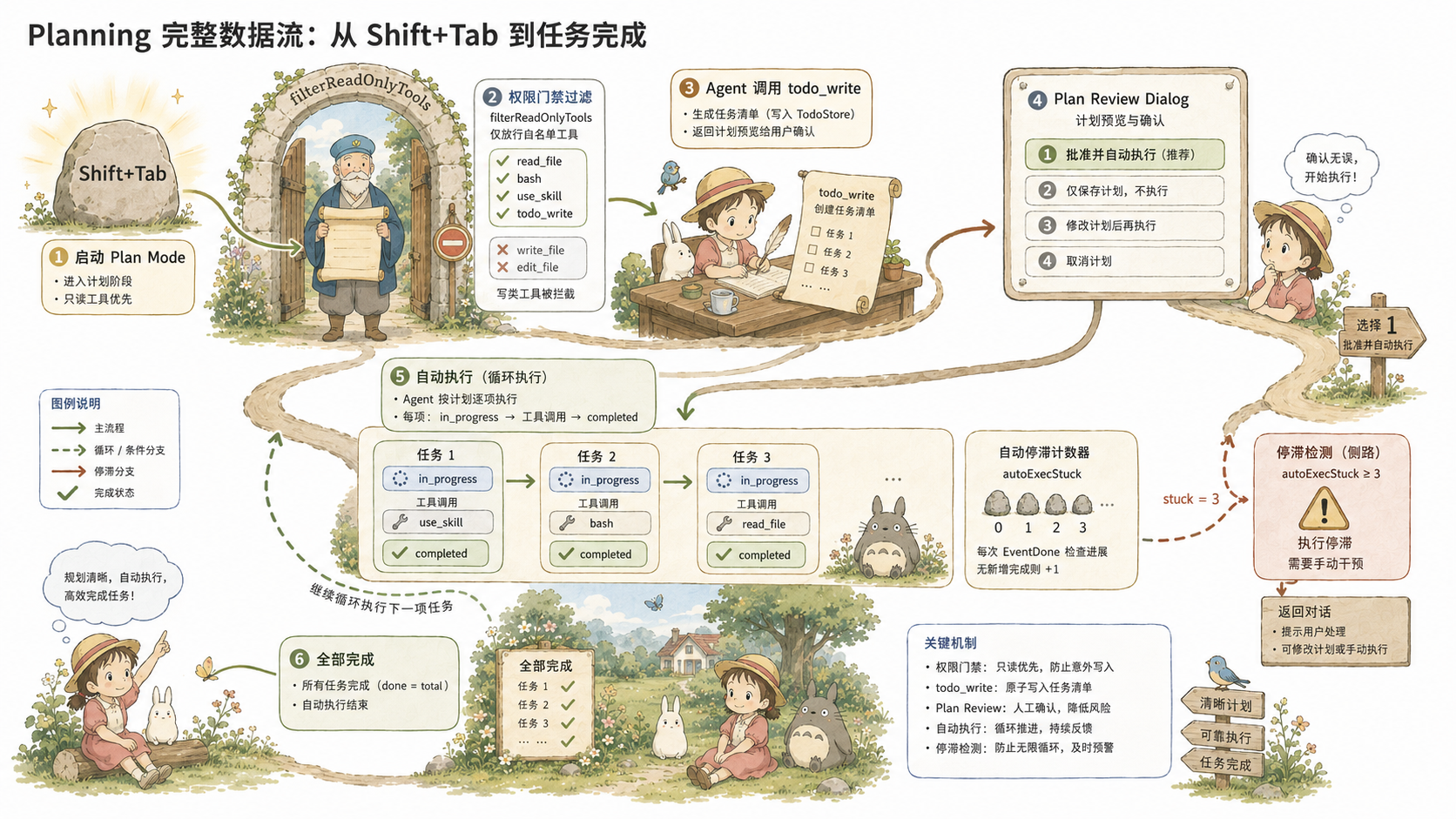
harness9 的 Planning 模块把"LLM 能做什么"的控制权从 prompt 下沉到工具 schema,把"LLM 有没有真正在干活"的校验从运行时观察变成前置拒绝,把"执行卡住了"的判断从人工干预变成停滞计数器。三件事各找最合适的层来做,没有上移也没有下移。
本文你将学到
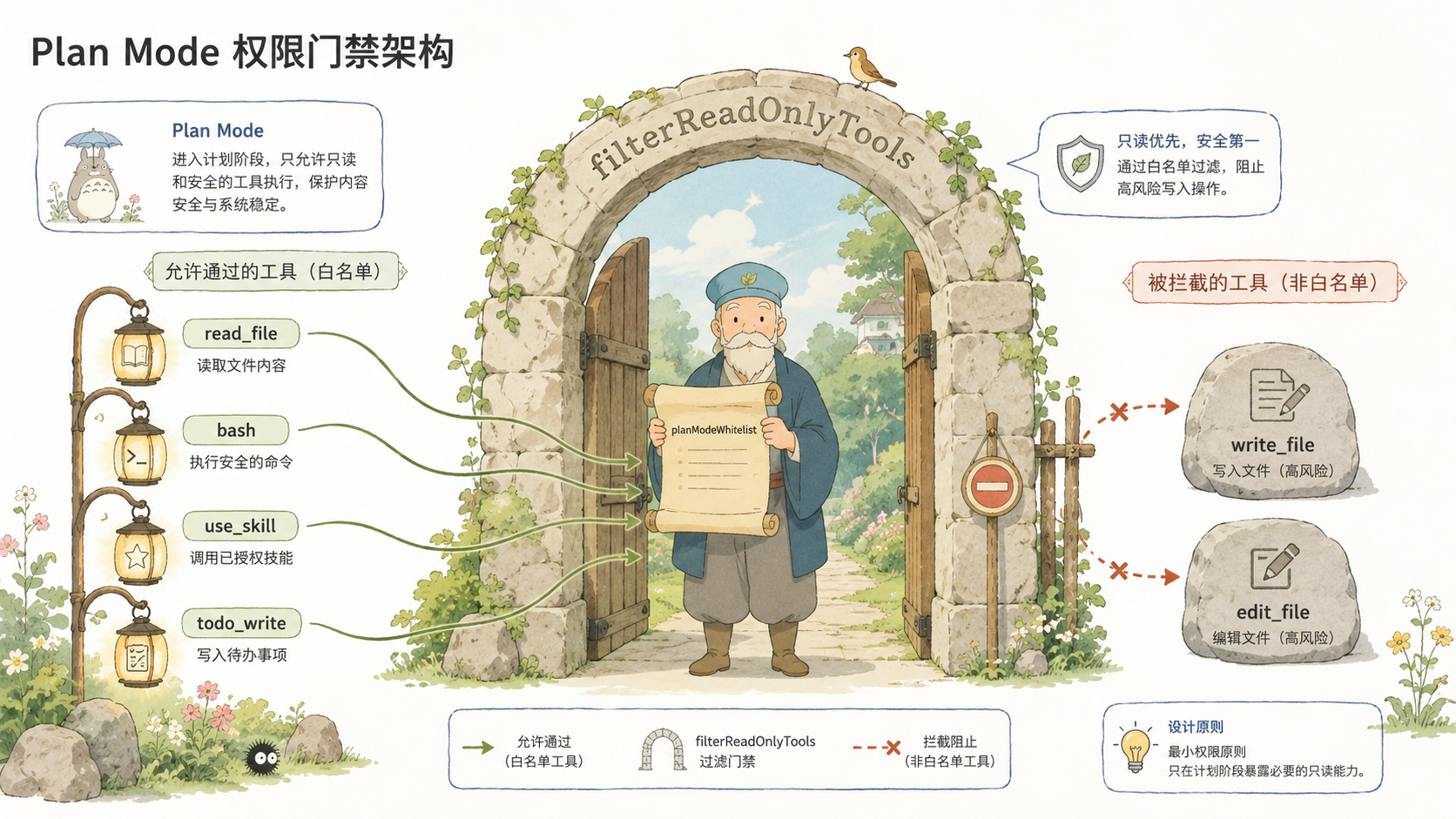
- 你将看清 Plan Mode 为什么用工具层白名单硬过滤,而不是在 prompt 里说"不要创建文件"——以及这个区别在 Agent 工程中意味着什么
- 你将理解 TodoStore 为什么选择全量替换而非增量 API,以及"双重 copy"策略背后的数据竞争考量
- 你将看到
todo_write防作弊校验如何从一个真实 bug(11 个任务被一次性批量完成)演化为"阈值 1"的设计决策 - 你将理解停滞检测(stagnation detection)为什么用
done计数而非pending计数来判断进度 - 你将掌握 FilePlanWriter 的路径策略:git 项目与非 git 项目的持久化位置差异及其原因
Plan Mode:一扇门,不是一句话
大多数 Agent 框架在"规划阶段"的实现方式是在 prompt 里加一段话:"现在你处于规划阶段,不要修改文件,只做分析。" 这是软约束(soft constraint)。LLM 可以忘记它,可以被历史上下文里的工具用例"诱导"绕过它,可以在上下文压缩后丢失它。
harness9 的做法是从工具 schema 里把写工具直接拿掉。
// internal/engine/agent_loop.go
var planModeWhitelist = map[string]bool{
"read_file": true,
"bash": true,
"use_skill": true,
"todo_write": true,
}
func filterReadOnlyTools(tools []schema.ToolDefinition) []schema.ToolDefinition {
var result []schema.ToolDefinition
for _, t := range tools {
if planModeWhitelist[t.Name] {
result = append(result, t)
}
}
return result
}write_file 和 edit_file 不在白名单里。Plan Mode 下,LLM 收到的工具列表里根本不存在这两个工具——它在 API 层就不存在了,而不是"存在但被要求不要用"。
这是工具层硬约束(hard constraint)与 prompt 层软约束的本质差异:前者是物理限制,后者是行为建议。
filterReadOnlyTools 在 runLoop 内部每个 Turn 开始时调用,而 planMode 本身在 runLoop 入口被快照:
// agent_loop.go — runLoop 入口
e.mu.RLock()
planMode := e.planMode // 快照一次,整个循环内不变
e.mu.RUnlock()
// 每个 Turn 开始时
if planMode == planning.PlanModePlan {
availableTools = filterReadOnlyTools(availableTools)
}快照的意义:TUI goroutine 可以在任何时候调用 eng.SetPlanMode(),但正在运行的 runLoop 已经拿到了开始时的模式副本,不会在循环中途被切换。这是 harness9 处理 goroutine 间状态一致性的惯用手法——不是加锁保护整个循环,而是在入口快照,循环内读只读变量。
工具层过滤之外,runLoop 还对用户 prompt 注入了行为引导前缀:
if planMode == planning.PlanModePlan {
userPrompt = "分析以下请求,用 todo_write 输出一份可直接执行的实现计划,然后用纯文字简述计划后停止。\n" +
// ...
"不要创建文件、执行 build/install 或做任何实际修改。\n\n" +
userPrompt
}注意措辞:prompt 说的是"不要这么做",而不是"你没有权限这么做"。权限由工具层决定,prompt 只引导行为。两层分工清晰,互不越权。
TodoStore:全量替换的设计取舍
TodoStore 是一个线程安全的内存任务列表,但它的 API 设计是反直觉的——它没有 Add、Update、Delete,只有 Write 和 Read。
// internal/planning/todo.go
type TodoStore struct {
mu sync.RWMutex
items []TodoItem
}
func (s *TodoStore) Write(items []TodoItem) []TodoItem {
s.mu.Lock()
defer s.mu.Unlock()
s.items = make([]TodoItem, len(items))
copy(s.items, items)
return s.copy()
}为什么全量替换而非增量 API?
LLM 调用 todo_write 时,它的自然输出形式是完整的任务列表,而不是"把第 3 项的 status 从 pending 改为 in_progress"这样的增量指令。增量 API 要求 LLM 对当前状态有精确的认知——ID 拼错了,状态就发散了。全量替换则不依赖 LLM 对历史状态的记忆,每次写入都是一个确定性快照。
实现简单是次要好处:Write 方法 5 行代码,没有合并逻辑,没有冲突处理。
Write 的双重 copy 策略值得注意:
// 第一次 copy:入参 items 与内部存储解耦
s.items = make([]TodoItem, len(items))
copy(s.items, items)
// 第二次 copy(s.copy()):返回值与内部存储解耦
return s.copy()调用方传进来的 items 切片、TodoStore 内部的 s.items、返回给调用方的副本,三者各自独立。如果直接 s.items = items,调用方后续修改原切片就会悄悄影响 TodoStore 内部状态。这类 bug 在并发环境下往往是间歇性的,极难复现。双重 copy 用 20 字节的内存代价换来了确定性的隔离。
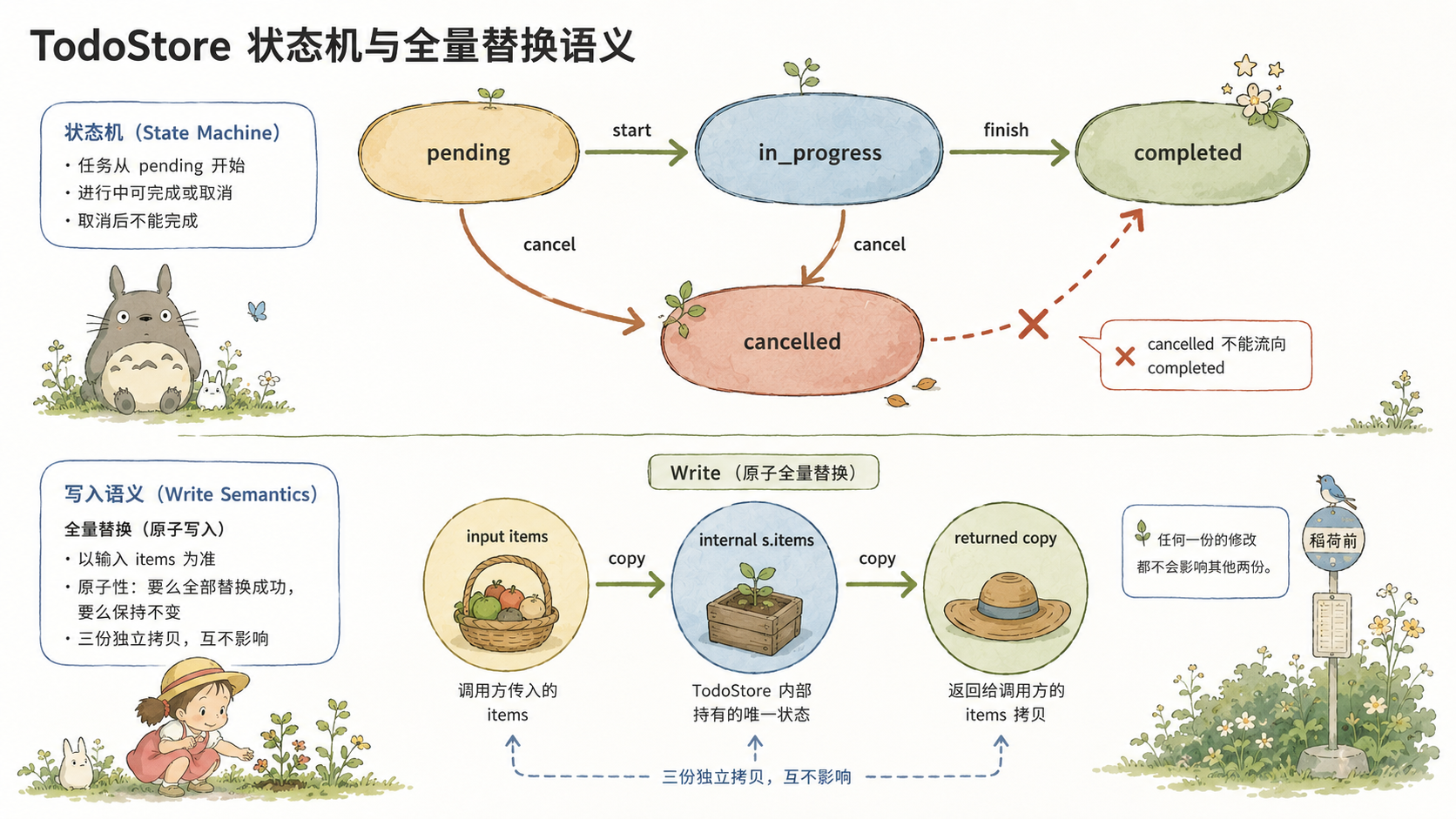
状态转换约束刻意没有放在 TodoStore 里:
// TodoStatus 状态转换约束由 todo_write 工具(tools 包)负责执行,TodoStore 本身不做校验。TodoStore 是无判断的存储层,业务约束由工具层表达。这个分层是蓄意的——TodoStore 可以被测试代码直接写入任意状态,不需要绕过校验逻辑;而工具层的校验逻辑可以独立变化,不需要改动存储层。
todo_write:防作弊的工程故事
todo_write 工具的防作弊校验不是从设计文档里推导出来的,它来自一个具体的 bug。
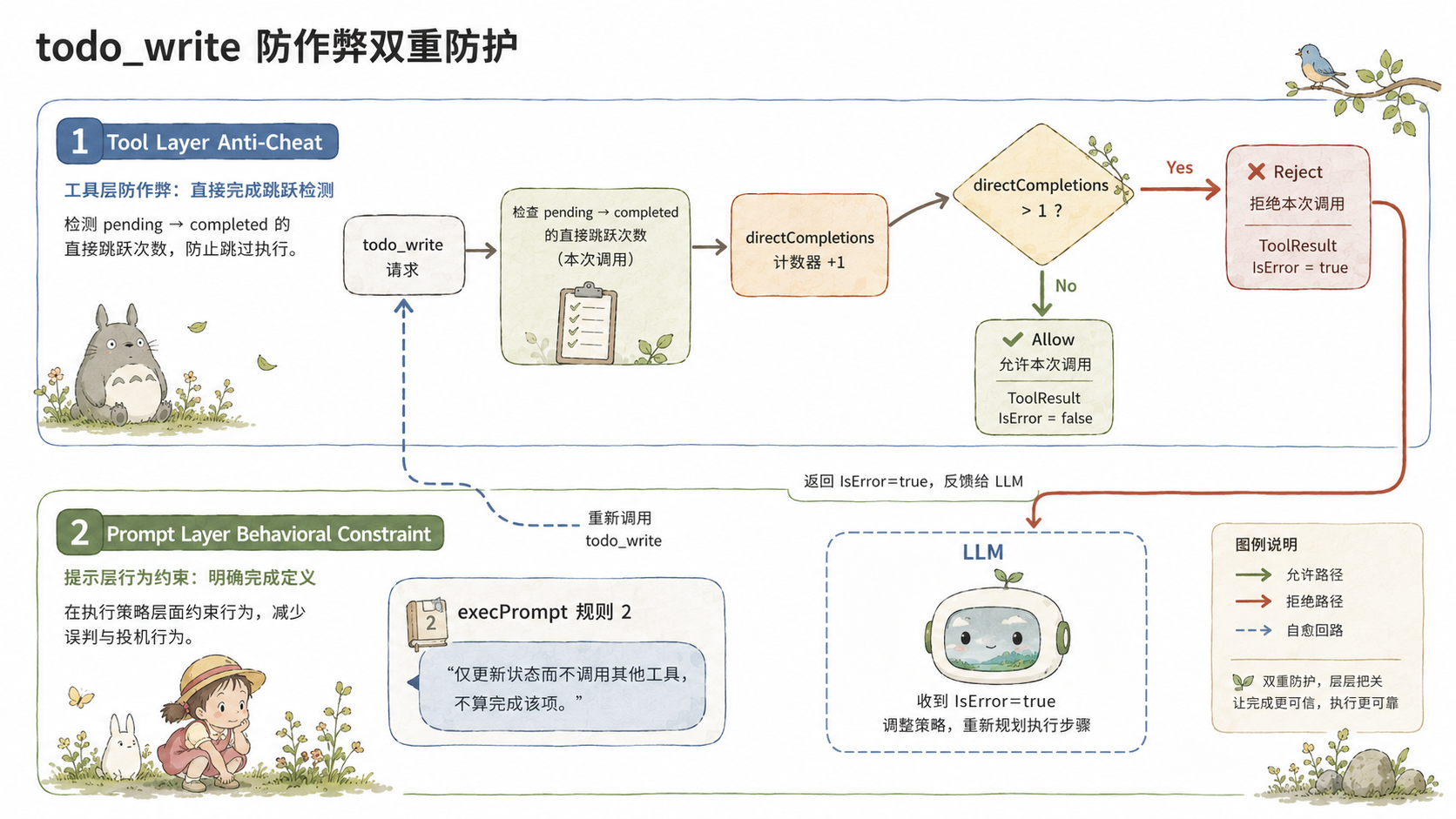
在一次连续对话中,LLM 将 11 个任务中的 9 个一次性批量完成(从 2/11 跳到 11/11),没有对应的文件创建或 bash 执行操作。这是"幻觉执行"——LLM 省略了实际工作,直接伪造进度。
修复策略是:在一次 todo_write 调用中,最多允许 1 个任务从非 in_progress 状态直接跳转到 completed:
// internal/tools/todo_write.go — Execute()
prev := t.store.Read()
prevStatus := make(map[string]planning.TodoStatus, len(prev))
for _, item := range prev {
prevStatus[item.ID] = item.Status
}
var directCompletions int
for _, item := range input.Todos {
if item.Status != planning.TodoCompleted {
continue
}
prior, exists := prevStatus[item.ID]
if !exists || prior == planning.TodoPending {
directCompletions++ // pending → completed,计入
continue
}
if prior == planning.TodoCancelled {
return "", fmt.Errorf("任务 %q 已取消,不能直接标记为 completed...", item.ID)
}
// in_progress → completed:合法,不计入
}
if directCompletions > 1 {
return "", fmt.Errorf(
"不允许在一次调用中将 %d 个任务直接标记为 completed(未经 in_progress)...",
directCompletions)
}阈值为什么是 1 而不是 0?
阈值 0 在续跑场景中会产生误伤:Agent 在一次续跑中完成了一项真实工作(调用了 bash 或 write_file),然后直接把对应 todo 标记为 completed 而没有经过 in_progress 中间步骤——这是正当行为,Agent 省略了状态标记的中间步骤,但工作是真实的。阈值 0 会导致 Agent 反复收到拒绝错误并陷入重试循环。
阈值 1 保留了对原始 bug 模式(大量批量完成)的防护,同时允许单项直接完成这一正常用法。
校验失败时,todo_write 返回 error,引擎将其包装为 ToolResult{IsError: true} 注入上下文。LLM 看到工具调用失败的错误信息,被迫重新组织参数。循环不会终止,Agent 自己修正自己——这是 harness9"自愈"(self-healing)设计的标准模式。
执行 Prompt 的设计意图
用户批准计划后,TUI 不是简单地发送"开始执行",而是发送一段精心设计的规范:
// cmd/harness9/tui_update.go
const execPrompt = "按照 todo 清单逐项执行。规则:\n" +
"1. 每开始一项前,用 todo_write 将其状态设为 in_progress\n" +
"2. 用工具完成该项的实际工作——创建文件、写代码、运行命令等;" +
"仅更新 todo_write 状态而不调用其他工具,不算完成该项\n" +
"3. 确认实际产出后,用 todo_write 将其状态设为 completed\n" +
"4. 不要输出进度摘要文字,立即处理下一项\n" +
"全部完成后,用一句话汇报整体结果。"规则 2 是关键:"仅更新状态而不调用其他工具,不算完成该项。" 这是 prompt 层对抗幻觉执行的约束,与工具层的批量完成检测形成双重防护。一层是硬拒绝,一层是行为引导——两层都在防同一件事,但机制不同。
续跑时用更精简的 execContinuePrompt:
const execContinuePrompt = "继续处理 todo 清单中下一个 pending 或 in_progress 的任务项。" +
"先用 todo_write 标记为 in_progress,然后用工具完成实际工作(写文件、执行命令等)," +
"确认产出后标记为 completed,再处理下一项。" +
"不要只更新状态而不做实际操作,不要输出进度摘要。"续跑不需要重复完整规则——LLM 的上下文里有 execPrompt 的历史,已知晓基本框架。精简版只需要提示"继续下一项",减少无效 token 消耗。
停滞检测:用 done 计数,而非 pending 计数
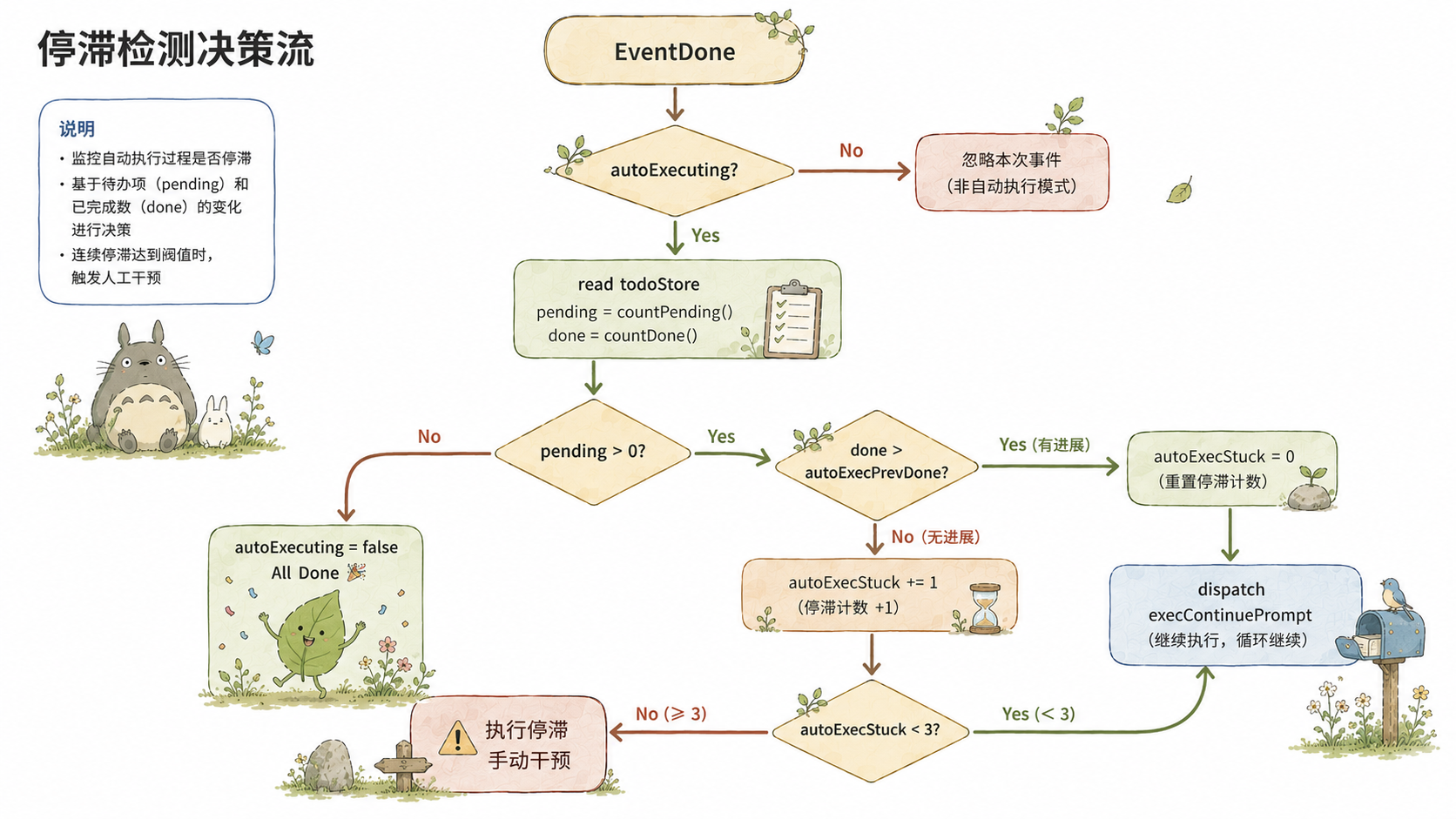
自动执行(autoExecuting)模式下,每次 EventDone 触发以下决策:
// cmd/harness9/tui_update.go — EventDone handler
if m.autoExecuting && m.todoStore != nil {
items := m.todoStore.Read()
var pending, done int
for _, item := range items {
switch item.Status {
case planning.TodoPending, planning.TodoInProgress:
pending++
case planning.TodoCompleted:
done++
}
}
if pending > 0 {
if done > m.autoExecPrevDone {
m.autoExecStuck = 0 // 有进度,重置
} else {
m.autoExecStuck++ // 无进度,计数
}
if m.autoExecStuck < 3 {
m.autoExecPrevDone = done
return m.dispatch(execContinuePrompt)
}
m.autoExecuting = false
m.lines = append(m.lines, dimStyle.Render(" ⚠ 执行停滞,请手动描述下一步"))
} else {
m.autoExecuting = false // 全部完成
}
}停滞检测的判断基准是 done(已完成数)而非 pending(待完成数)。这个选择值得展开说。
pending 的变化有两种来源:任务真正完成(pending → in_progress → completed)和任务被标记为进行中(pending → in_progress)。如果用 pending 减少来判断进度,LLM 只要不断把任务改成 in_progress 而不真正完成,就能持续通过进度检测——这是另一种形式的幻觉执行。
只有 completed 状态才代表真实的工作产出。done 计数在一轮 EventDone 后没有增加,意味着 LLM 运行了一整轮推理但没有推进任何任务到完成状态。连续 3 次如此,停滞检测介入。
阈值 3 是经验值:给 LLM 一些缓冲空间应对需要多轮探索才能完成的复杂任务,但不允许无限空转。
dispatch() 本身内置了并发保护:
func (m tuiModel) dispatch(prompt string) (tuiModel, tea.Cmd) {
if m.running {
return m, nil // 已有推理在进行,静默忽略
}
// ...
}autoExecuting 续跑时,dispatch 由 EventDone handler 在 Elm Update 单线程循环内调用,不存在并发问题。running 检查是额外安全网,防止其他代码路径意外触发双路推理。
FilePlanWriter:不只是写文件
每次 todo_write 工具成功写入后,如果注入了 FilePlanWriter,任务列表会被持久化为 Markdown 文件:
// internal/hooks/plan_writer.go
func NewFilePlanWriter(workDir, homeDir, sessionID string) (*FilePlanWriter, error) {
timestamp := time.Now().Unix()
slug := sessionID[:8]
filename := fmt.Sprintf("%d-%s.md", timestamp, slug)
var base string
if isGitRepo(workDir) {
base = filepath.Join(workDir, ".harness9", "plans")
} else {
base = filepath.Join(homeDir, ".harness9", "plans")
}
// ...
}路径策略有一个简单但有意思的分支:isGitRepo(workDir) 检测工作目录是否含有 .git。
git 项目写入 workDir/.harness9/plans/——这个路径在项目目录下,可以被纳入版本控制,也可以通过 .gitignore 排除。把规划产物放在项目旁边,让任务状态与代码变更保持上下文关联。
非 git 项目写入 homeDir/.harness9/plans/——没有项目目录的概念,集中存放在 home 目录下的个人数据区,不污染当前工作目录。
这个判断是在构造时做的,不是在每次写入时做的。isGitRepo 调用一次,路径固定下来,Write 方法每次覆写同一个文件而不是重新计算路径。
PlanWriter 接口定义在 planning 包而非 hooks 包:
// internal/planning/plan_writer.go
type PlanWriter interface {
Write(todos []TodoItem) error
}这是 harness9 一贯的接口位置原则:接口定义在使用者侧,而非实现者侧。TodoWriteTool 使用 PlanWriter,接口就定义在 planning 包。FilePlanWriter 实现这个接口,但接口不在 hooks 包里声明。这个选择的实际作用是切断了 tools 包对 hooks 包的依赖——如果接口在 hooks 包,tools 就必须 import hooks,而 hooks 又会 import tools,循环导入立刻出现。

跨 runLoop 的状态连续性
TodoStore 的内容随 Session 持久化到 SQLite,每次 runLoop 启动和结束时自动同步:
// agent_loop.go — runLoop
// 启动:从 Session 恢复
if sess != nil && todoStore != nil {
if todos, err := sess.GetTodos(ctx); err == nil {
todoStore.Write(todos)
}
}
// 结束:defer 保证所有退出路径都执行
defer func() {
if sess != nil && todoStore != nil {
if err := sess.SaveTodos(ctx, todoStore.Read()); err != nil {
log.Print(...)
}
}
}()autoExecuting 模式下,每次续跑都是一次独立的 runLoop 调用。每次 runLoop 启动时从 DB 恢复 TodoStore,结束时写回——这确保了 todo_write 防作弊校验的正确性:pending 的任务在上次运行后保存到 DB,下次运行时加载回内存,prevStatus 快照能准确反映任务的历史状态。如果不做持久化,跨 runLoop 的状态对照就会失效,批量完成检测就成了哑炮。
defer 是关键细节:不管 runLoop 因为自然终止(LLM 不再调用工具)、MaxTurns 超限还是 context 取消而退出,SaveTodos 都会执行。
上下文压缩时,活跃任务会随摘要一起注入:
// internal/memory/summarization.go — Compact()
if c.TodoInjector != nil {
if todoText := c.TodoInjector.FormatForInjection(); todoText != "" {
summaryContent += "\n\n## Active Tasks\n" + todoText
}
}压缩后的摘要消息末尾会追加:
## Active Tasks
[ ] 实现 handler/user.go
[>] 配置数据库连接
[ ] 添加路由注册即使对话历史被压缩得面目全非,未完成的任务也不会从 LLM 的视野中消失。
todo_write 工具的设计细节
todo_write 是 Planning 模块对 LLM 暴露的唯一任务管理接口。它的设计值得多看一眼,因为细节里藏着几个有意思的工程决策。
双模式:一个工具,两种调用语义
todo_write 的参数定义只有一个字段:todos。但这个字段有两种完全不同的语义:
// internal/tools/todo_write.go
type todoWriteArgs struct {
Todos []planning.TodoItem `json:"todos"`
}
// Execute:通过 len(input.Todos) > 0 区分读写模式
if len(input.Todos) > 0 {
// 写操作:全量替换 + 防作弊校验
current = t.store.Write(input.Todos)
} else {
// 读操作:返回当前快照,不修改状态
current = t.store.Read()
}省略 todos 字段或传空数组,工具变成只读查询;传入非空数组,工具执行全量替换。两种模式复用同一个工具注册名,LLM 不需要区分"读取 todo"和"写入 todo"两个工具——一个工具,用参数控制行为。
这不只是为了简洁。工具列表的长度会消耗 LLM 的上下文窗口,也影响模型对工具选择的分发准确性。在工具数量本来就不少的情况下,把读写合并进一个工具是减少认知负担的务实选择。
Schema 里的状态机
todo_write 的 JSON Schema 把 status 字段定义为有限枚举:
"status": map[string]interface{}{
"type": "string",
"enum": []string{"pending", "in_progress", "completed", "cancelled"},
},四个合法值,其他值不会被提交到 API。这是把状态机的合法集合下推到 Schema 层——不需要在 Execute 里做枚举校验,模型在调用工具时就已经被约束在合法状态范围内了。
这和 Plan Mode 的工具过滤是同一个思路的不同粒度:Plan Mode 在工具列表层面做约束(某些工具整体不可见),Schema 在参数层面做约束(某个字段的合法值有限)。两者都在"工具定义"这一层动手,不依赖 prompt 里的措辞。
nil 到 [] 的规范化
Execute 的返回路径有一个细节:
if current == nil {
current = []planning.TodoItem{}
}
b, err := json.Marshal(current)json.Marshal(nil) 产生 "null",json.Marshal([]planning.TodoItem{}) 产生 "[]"。两者对 Go 程序来说语义等价,但对 LLM 来说差异很大——null 是一个无结构的值,[] 是一个明确的空列表。LLM 需要知道"当前没有任务"而不是"任务列表字段不存在",这一个字符的差异决定了 LLM 能否正确推断下一步行为。
WithPlanWriter:可选注入而非必选依赖
TodoWriteTool 通过 Option 模式注入 PlanWriter:
// internal/tools/todo_write.go
type TodoWriteOption func(*TodoWriteTool)
func WithPlanWriter(pw planning.PlanWriter) TodoWriteOption {
return func(t *TodoWriteTool) { t.planWriter = pw }
}planWriter 字段默认为 nil,不注入时跳过持久化,工具本身仍然可用。这意味着 TodoWriteTool 在单元测试中可以直接实例化,不需要构造一个真实的 FilePlanWriter——测试只需要验证任务列表的状态变化,不需要关心文件系统。
Option 模式在 harness9 里是构造函数的标准约定(WithMaxTurns、WithToolTimeout 等都是这个模式),WithPlanWriter 遵循了同样的设计语言,新读者不需要额外学习就能理解注入语义。
持久化失败时的处理也值得注意:
if t.planWriter != nil {
if err := t.planWriter.Write(current); err != nil {
log.Print(logfmt.FormatMsg("todo_write", fmt.Sprintf("写入计划文件失败: %v", err)))
}
}写文件失败只记日志,不向 LLM 回传错误。这是 fail-open 策略——持久化是辅助功能,不是任务管理的核心路径。如果 FilePlanWriter 因磁盘满或权限问题失败,任务列表本身已经写入 TodoStore(内存中),Agent 可以继续运行,只是这次的规划产物不会落盘。反过来如果 planWriter.Write 的失败被 propagate 给 LLM,会导致 Agent 进入错误恢复循环,为一个非核心功能的失败付出不必要的代价。
结语
Planning 模块的真正价值不是"给 Agent 加了个规划阶段",而是把 Agent 行为的几个关键约束点从软层(prompt)挪到了硬层(代码)。每一个挪移都需要一个理由:为什么这件事不能靠 prompt 说清楚?答案通常是:prompt 可以被忘记、被压缩、被绕过——代码不会。
思考题:todo_write 的防作弊阈值是 1,如果改成 2 会影响什么场景?改成 0 又会影响什么?