Agent Loop — 500 行 Go 代码驱动的生产级 ReAct 主循环
关于 harness9
harness9 是一款轻量、完备、生产可用的 Go 语言 Agent Harness 框架。
⭐ Star 是对开源工作最直接的支持,欢迎提 Issue 和 PR。
TL;DR
harness9 的 AgentLoop 核心在 internal/engine/ 目录下,不到 500 行 Go 代码。它用一个显式 for 循环实现标准推理行动循环(ReAct Loop),用 goroutine 并发执行工具,用 emitter 抽象解耦阻塞模式和流式模式,用三重条件保障循环终止。没有图引擎,没有第三方 Loop 框架,循环控制权完全在框架手里。
为什么不是图引擎
在动手讲实现之前,先回答一个更基本的问题:为什么 harness9 选择显式循环,而不是更"现代"的图编排?
对比调研的七个框架,选择可以分成三类:
- 委托型:OpenCode 和 OpenClaw 把循环控制权交给 Vercel AI SDK 的
streamText,通过maxSteps参数限制轮次。好处是代码少,代价是循环逻辑变成黑盒,无法在每轮之间插入自定义逻辑。 - 图编排型:DeepAgents 委托 LangGraph 的
StateGraph,通过recursion_limit: 9999控制深度。图模型带来强大的分支和并发能力,但也引入了图引擎依赖和陡峭的心智模型。 - 显式循环型:OpenHarness、HermesAgent、OpenAI Agent SDK 都用显式
while True循环,完整掌握每一次迭代的执行路径。
harness9 选择显式循环,理由非常直接:Agent Loop 本质上是一个带状态的迭代过程,用循环表达它比用图更自然。每一轮的逻辑是线性的——调用 LLM、检查终止、执行工具、注入观察结果——这不是一个需要图来建模的问题。引入图引擎只会把 200 行清晰的代码变成另一个需要理解的框架。
Go 的 for 循环加上 goroutine,已经足够。
ReAct 主循环的结构
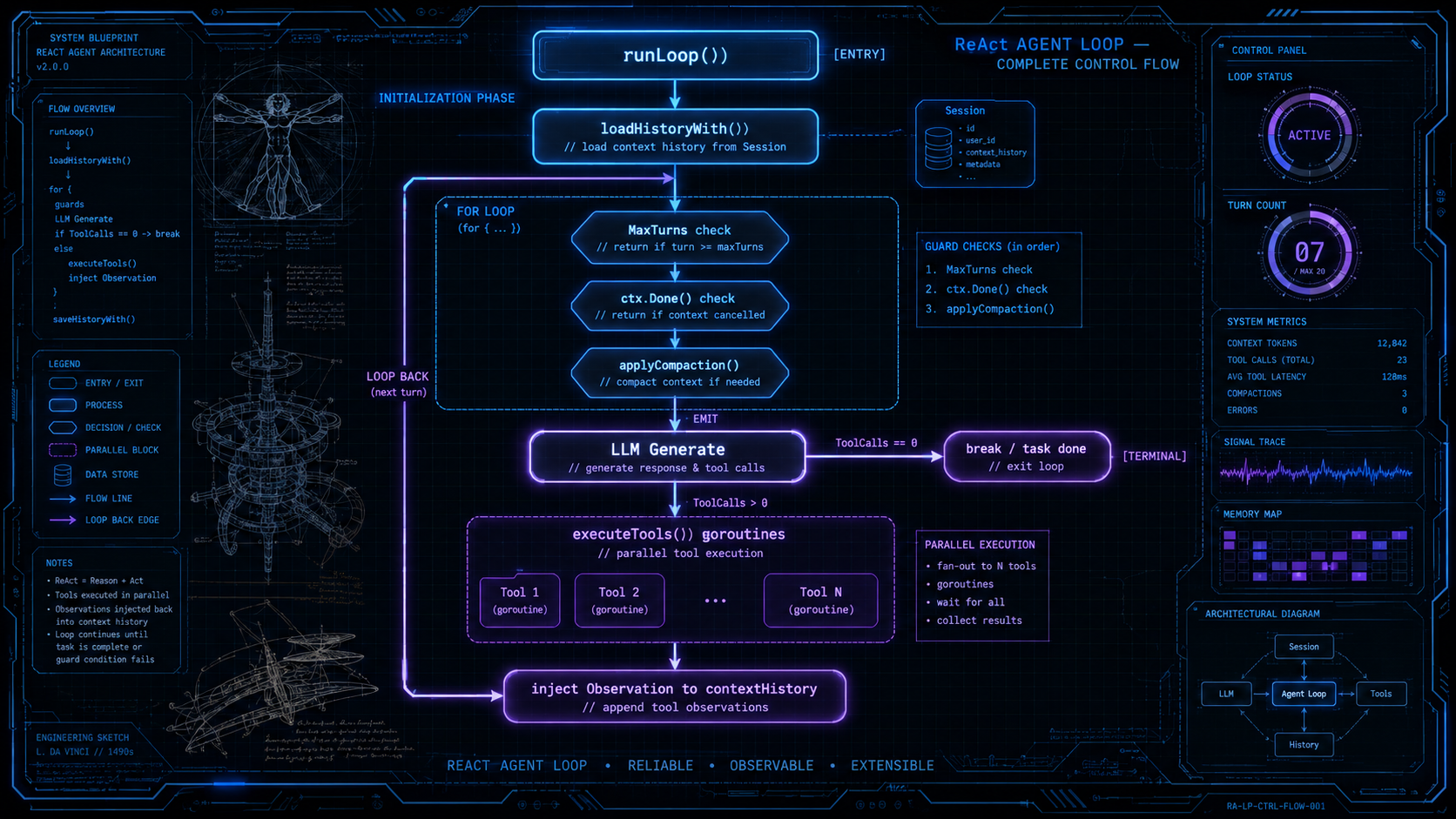
runLoop 是 Run 和 RunStream 共享的主循环内核,位于 internal/engine/agent_loop.go。整体结构:
func (e *AgentEngine) runLoop(ctx context.Context, userPrompt string, logPrefix string, em emitter) error {
// 1. 快照配置(避免与 TUI goroutine 的数据竞争)
e.mu.RLock()
sess, comp, planMode, todoStore := e.session, e.compactor, e.planMode, e.todoStore
e.mu.RUnlock()
contextHistory, startLen := e.loadHistoryWith(ctx, userPrompt, sess)
defer func() { /* 保存 TodoStore */ }()
turnCount := 0
for {
turnCount++
// 三重终止保障
if e.maxTurns > 0 && turnCount > e.maxTurns { return ... }
select { case <-ctx.Done(): return ...; default: }
// 压缩 + token 估算 + LLM 调用
compactedHistory := e.applyCompactionWith(comp, contextHistory)
responseMsg, usage, err := em.generate(ctx, turnCount, compactedHistory, availableTools)
contextHistory = append(contextHistory, *responseMsg)
// 自然终止
if len(responseMsg.ToolCalls) == 0 { break }
// 并发工具执行
results := e.executeTools(ctx, turnCount, responseMsg.ToolCalls, logPrefix, em)
// 注入 Observation
for i, toolCall := range responseMsg.ToolCalls {
contextHistory = append(contextHistory, schema.Message{
Role: schema.RoleUser, Content: results[i].Output, ToolCallID: toolCall.ID,
})
}
}
e.saveHistoryWith(ctx, sess, contextHistory, startLen)
return nil
}循环体的结构就是 ReAct 的语义:推理(Think)由 LLM 完成,行动(Act)由工具执行,观察(Observe)通过 Observation 注入上下文,然后进入下一轮推理。
上下文初始化:system prompt 不持久化
进入循环之前,loadHistoryWith 完成两件事:从 Session 恢复历史,注入 system prompt。
func (e *AgentEngine) loadHistoryWith(ctx context.Context, userPrompt string, sess memory.Session) ([]schema.Message, int) {
var history []schema.Message
if sess != nil {
msgs, _ := sess.GetMessages(ctx, 0)
history = msgs
}
// system prompt 不持久化到 DB,每次调用时重新注入
if len(history) == 0 || history[0].Role != schema.RoleSystem {
history = append([]schema.Message{{Role: schema.RoleSystem, Content: e.buildSystemPrompt()}}, history...)
}
startLen := len(history)
history = append(history, schema.Message{Role: schema.RoleUser, Content: userPrompt})
return history, startLen
}startLen 标记了"本次 Run 新增消息的起始位置"。saveHistoryWith 调用时只持久化 msgs[startLen:],system prompt 不写库。这个决策避免了重复持久化 system prompt 的问题——跨会话 system prompt 可能会变(比如工作目录变更、Skills 更新),每次从头重建才能保证正确性。
三重终止保障
无限循环是 Agent 系统最常见的故障模式。harness9 用三层机制防止它:
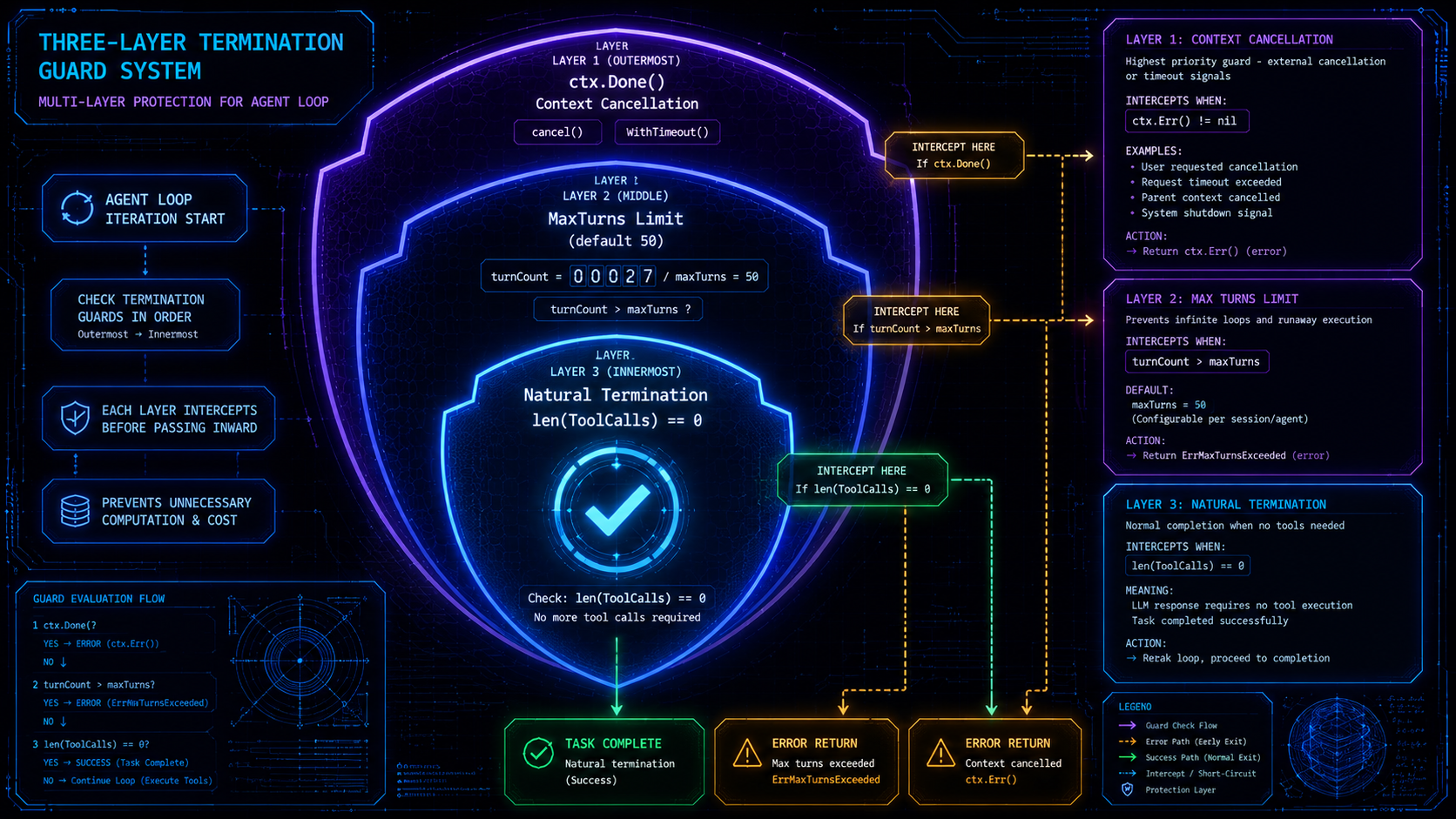
第一层:自然终止。 模型不再发起工具调用时,任务完成,主动 break:
if len(responseMsg.ToolCalls) == 0 {
break
}第二层:MaxTurns 安全阀。 默认 50 轮,防止模型陷入工具调用死循环:
if e.maxTurns > 0 && turnCount > e.maxTurns {
return fmt.Errorf("已达最大 Turn 数 (%d),循环终止", e.maxTurns)
}第三层:Context 取消。 每轮循环开始时检测外部取消信号,支持超时控制和手动中断:
select {
case <-ctx.Done():
return fmt.Errorf("context 已取消: %w", ctx.Err())
default:
}注意检查顺序:Context 取消在 MaxTurns 检查之后。当 turnCount 超限时直接返回错误,不再消耗 ctx.Done() 的检查开销。这是一个微小但有意识的排列——通常 MaxTurns 触发比外部取消更常见。
测试用例 TestMaxTurnsLimit 和 TestContextCancellation 直接验证这两种路径:
// MaxTurns 安全阀:LLM 持续发起工具调用时,达到上限后强制退出
eng := NewAgentEngine(p, r, "/test", WithMaxTurns(2))
err := eng.Run(context.Background(), "loop forever")
// err 包含 "最大 Turn 数"
// Context 取消:立即 cancel 后调用
ctx, cancel := context.WithCancel(context.Background())
cancel()
err = eng.Run(ctx, "cancelled task")
// err 包含 "context 已取消"并发工具执行:goroutine + 预分配切片
当模型在一轮内发起多个工具调用时,串行执行是一种性能浪费。harness9 用 goroutine 并发执行所有工具。
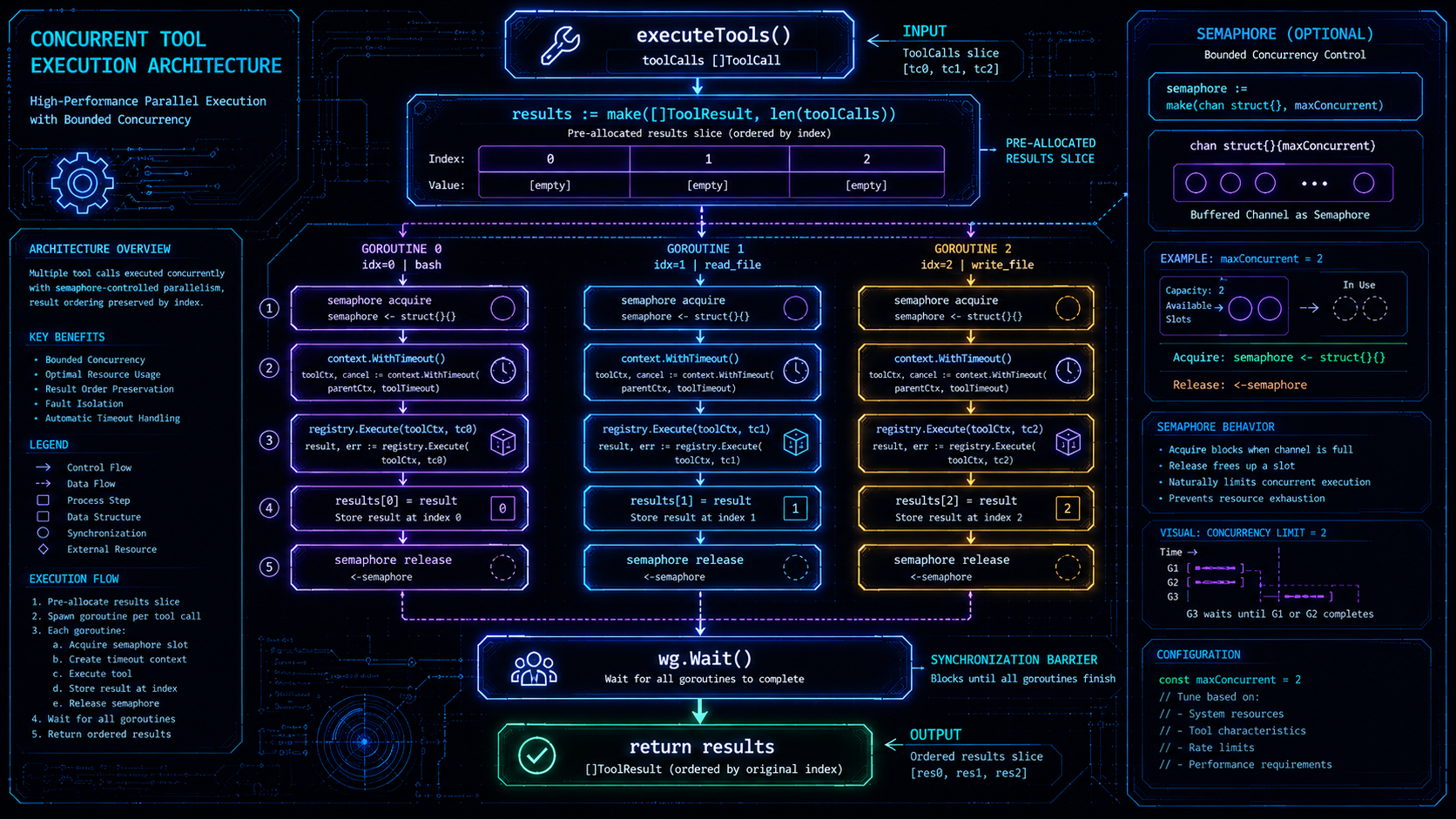
executeTools 的实现紧凑且无数据竞争:
func (e *AgentEngine) executeTools(ctx context.Context, turn int, toolCalls []schema.ToolCall, logPrefix string, em emitter) []schema.ToolResult {
results := make([]schema.ToolResult, len(toolCalls)) // 预分配,按索引写入
var wg sync.WaitGroup
var sem chan struct{}
if e.maxConcurrentTools > 0 {
sem = make(chan struct{}, e.maxConcurrentTools) // 信号量限制并发度
}
for i, toolCall := range toolCalls {
wg.Add(1)
go func(idx int, tc schema.ToolCall) {
defer wg.Done()
if sem != nil {
sem <- struct{}{}
defer func() { <-sem }()
}
toolCtx := ctx
var cancel context.CancelFunc
if e.toolTimeout > 0 {
toolCtx, cancel = context.WithTimeout(ctx, e.toolTimeout)
defer cancel()
}
em.toolStart(turn, tc)
start := time.Now()
results[idx] = e.registry.Execute(toolCtx, tc) // 写入独立索引位置
em.toolDone(turn, tc, results[idx], time.Since(start))
}(i, toolCall)
}
wg.Wait()
return results
}几个关键设计决策:
预分配切片 + 索引写入,而不是 channel 收集。 结果集大小在循环开始前已知(len(toolCalls)),不需要动态扩容。每个 goroutine 写入独立的 results[idx],天然无锁——不同索引之间没有内存共享冲突。这比用 channel 收集结果再排序更简单,也避免了排序开销。
idx 和 tc 显式传参,不用闭包捕获。 Go 的 range 变量在循环迭代中被复用,如果用闭包直接捕获 i 和 toolCall,所有 goroutine 可能读到相同的最终值。go func(idx int, tc schema.ToolCall) 的传参方式在编译期就确定了每个 goroutine 的独立副本。
信号量用有缓冲 channel。 make(chan struct{}, maxConcurrentTools) 是 Go 中信号量的惯用实现。0 表示不限制并发(sem 为 nil),直接跳过 acquire/release 逻辑,没有任何额外开销。
每个工具独立 context.WithTimeout。 toolCtx 从父 ctx 派生,单个工具超时不影响同 Turn 内其他工具的执行。超时的工具返回 IsError: true 的结果,LLM 收到 Observation 后可以重试。
自愈能力:错误是 Observation,不是异常
传统的错误处理哲学是:工具失败 = 中断执行,向上抛错。harness9 采用完全不同的处理方式:工具执行失败的结果原样回传给 LLM 作为 Observation。
ToolResult.IsError 是这个机制的关键字段:
type ToolResult struct {
ToolCallID string `json:"tool_call_id"`
Output string `json:"output"` // 失败时是错误信息
IsError bool `json:"is_error"` // 标记执行失败
}当 Registry.Execute 返回 IsError: true 的结果时,runLoop 不返回错误,而是把这个结果当作普通 Observation 注入上下文:
for i, toolCall := range responseMsg.ToolCalls {
contextHistory = append(contextHistory, schema.Message{
Role: schema.RoleUser,
Content: results[i].Output, // "command not found" 或其他错误信息
ToolCallID: toolCall.ID,
})
}LLM 在下一轮收到包含错误信息的上下文,可以诊断原因并修正参数重试。测试 TestToolErrorResult 验证了这一链路:
// errorRegistry 对任何工具调用都返回 IsError: true 的结果
r := &errorRegistry{} // output: "command not found", IsError: true
eng := NewAgentEngine(p, r, "/test")
err := eng.Run(context.Background(), "test error")
// 不返回 error,错误作为 Observation 传给下一轮 LLM
// 验证:第二轮 LLM 收到的最后一条消息包含错误输出
lastMsg := p.calls[1].messages[len(p.calls[1].messages)-1]
// lastMsg.Content 包含 "command not found"这个设计的代价是:如果 LLM 不能修复问题,循环会持续直到 MaxTurns 触发。收益是:很多工具调用失败可以自动恢复,不需要人工干预。
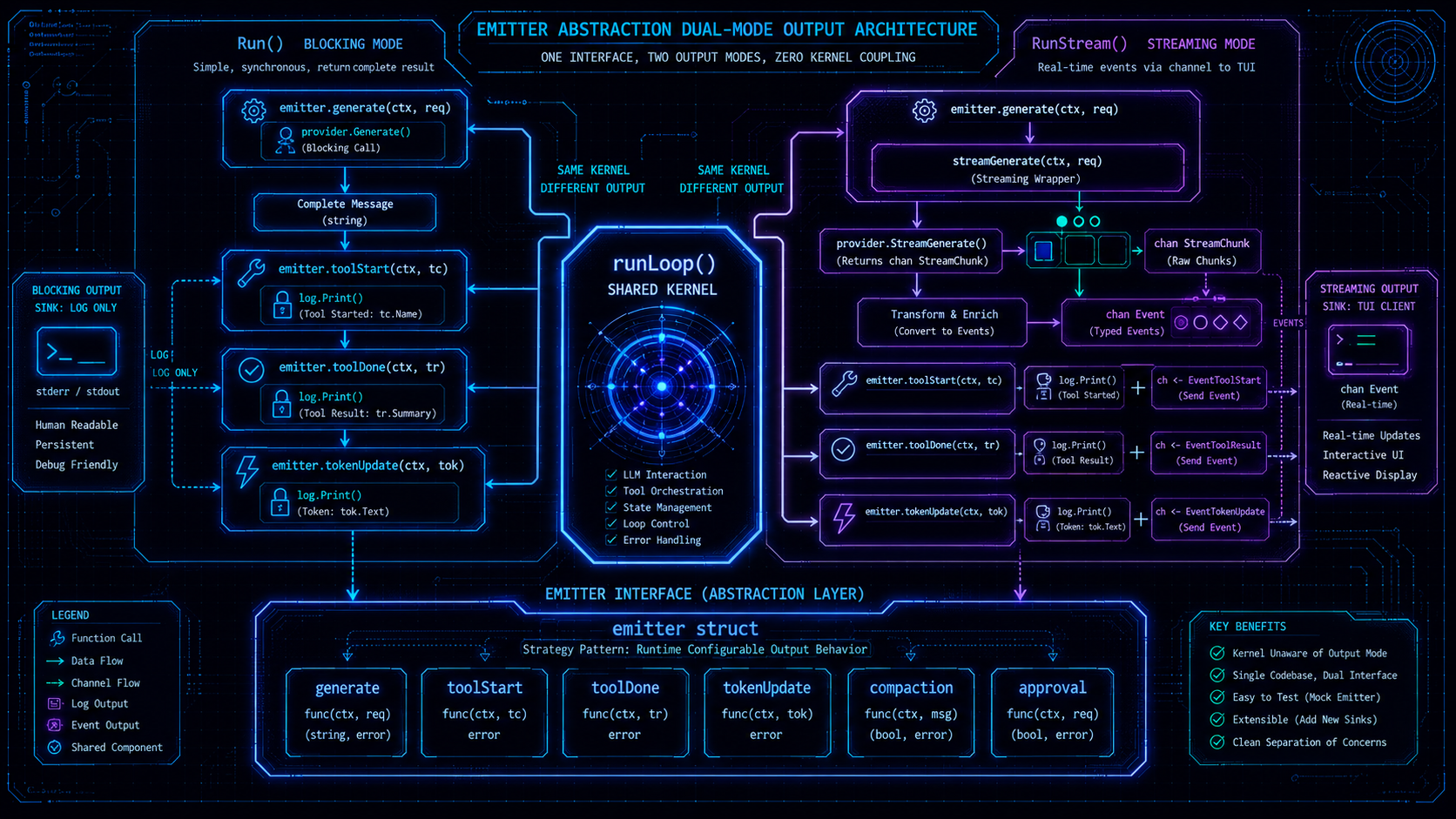
emitter 抽象:一个循环,两种输出
harness9 的一个核心设计决策是:阻塞模式(Run)和流式模式(RunStream)共享同一个 runLoop 实现。两者的区别完全封装在 emitter 结构体中。
emitter 的定义清楚地揭示了两种模式的差异点:
type emitter struct {
generate func(ctx context.Context, turn int, history []schema.Message, tools []schema.ToolDefinition) (*schema.Message, *schema.Usage, error)
toolStart func(turn int, tc schema.ToolCall)
toolDone func(turn int, tc schema.ToolCall, result schema.ToolResult, d time.Duration)
tokenUpdate func(tokens, window int)
compaction func(data CompactionData)
approval hooks.ApprovalFunc // Human-in-the-Loop 审批回调
}Run 构造的 emitter,generate 调用阻塞式 provider.Generate,文本打印到 stdout:
em := emitter{
generate: func(ctx context.Context, _ int, history []schema.Message, tools []schema.ToolDefinition) (*schema.Message, *schema.Usage, error) {
msg, usage, err := e.provider.Generate(ctx, history, tools)
if msg.Content != "" {
fmt.Printf("[assistant] %s\n", msg.Content)
}
return msg, usage, nil
},
toolStart: func(turn int, tc schema.ToolCall) {
log.Print(logfmt.FormatToolStart("engine", turn, tc))
},
// ...
}RunStream 构造的 emitter,generate 调用 streamGenerate,将文本增量转发为 EventActionDelta 发送到 channel:
em := emitter{
generate: func(ctx context.Context, turn int, history []schema.Message, tools []schema.ToolDefinition) (*schema.Message, *schema.Usage, error) {
return e.streamGenerate(ctx, ch, turn, history, tools)
},
toolStart: func(turn int, tc schema.ToolCall) {
log.Print(logfmt.FormatToolStart("engine-stream", turn, tc))
sendEvent(ctx, ch, Event{Type: EventToolStart, Turn: turn, Data: tc})
},
// ...
}runLoop 本身对输出方式一无所知,它只调用 em.generate、em.toolStart、em.toolDone。这是策略模式(Strategy Pattern)的直接应用,但比定义接口更轻量——用函数字段而不是接口,省去了类型断言和方法集的心智负担。
流式架构:两层 channel
RunStream 的数据流经过两层 channel 转换:
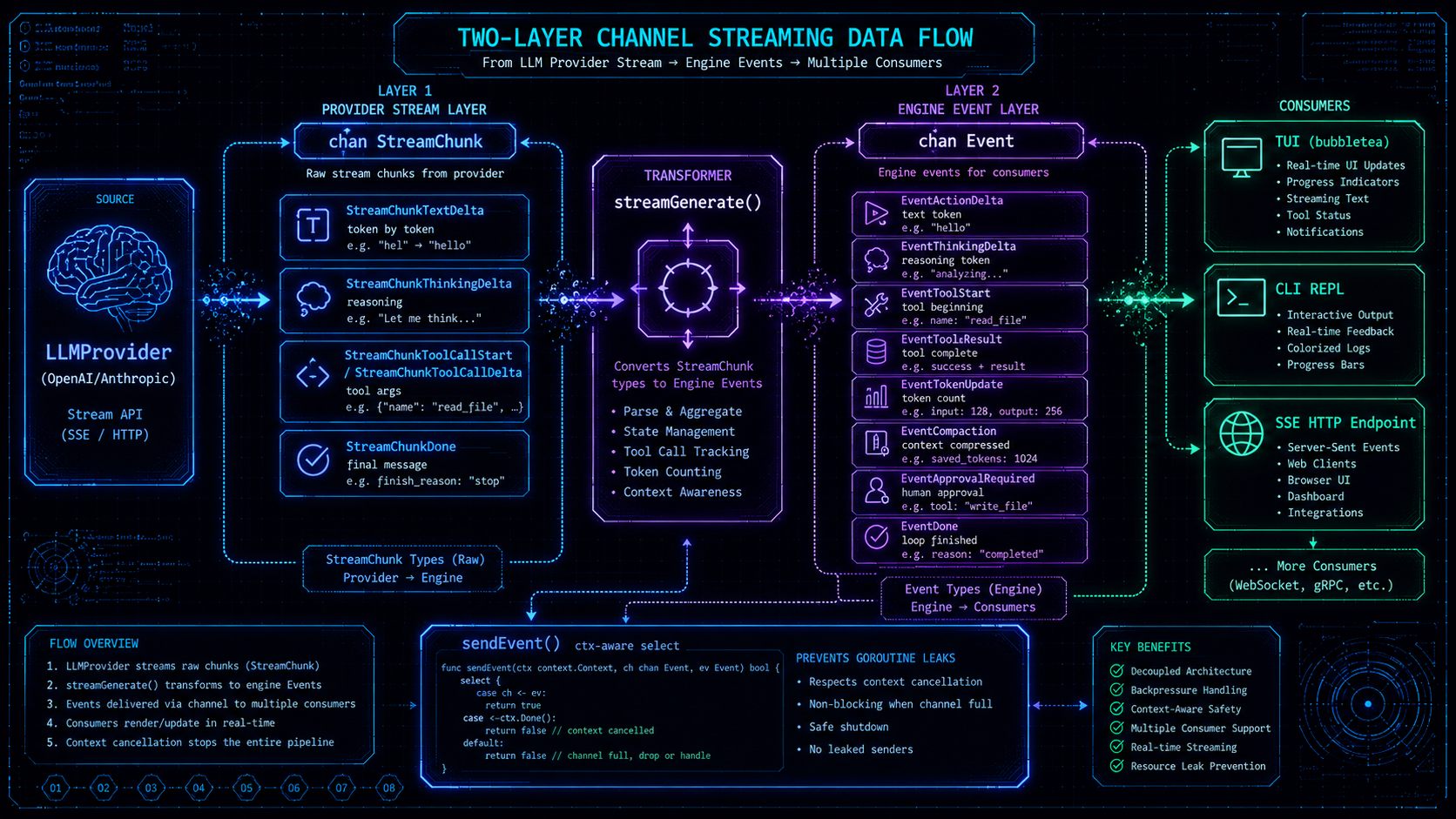
第一层:provider.GenerateStream 返回 <-chan StreamChunk,这是 Provider 层的增量协议,携带 token 级别的文本增量和工具调用参数增量。
第二层:streamGenerate 消费 StreamChunk channel,将其转换为面向客户端的语义化 Event,发送到 chan Event:
func (e *AgentEngine) streamGenerate(ctx context.Context, ch chan<- Event, turn int,
history []schema.Message, tools []schema.ToolDefinition) (*schema.Message, *schema.Usage, error) {
stream, err := e.provider.GenerateStream(ctx, history, tools)
// ...
for chunk := range stream {
switch chunk.Type {
case schema.StreamChunkTextDelta:
if !sendEvent(ctx, ch, Event{Type: EventActionDelta, Turn: turn, Data: chunk.Delta}) {
return nil, nil, ctx.Err()
}
case schema.StreamChunkThinkingDelta:
if !sendEvent(ctx, ch, Event{Type: EventThinkingDelta, Turn: turn, Data: chunk.Delta}) {
return nil, nil, ctx.Err()
}
case schema.StreamChunkDone:
msg = chunk.Message
usage = chunk.Usage
}
}
return msg, usage, nil
}sendEvent 是一个关键的辅助函数,它用 select 同时监听 channel 发送和 ctx.Done():
func sendEvent(ctx context.Context, ch chan<- Event, evt Event) bool {
select {
case <-ctx.Done():
return false
case ch <- evt:
return true
}
}没有这个 select,当消费者(TUI)停止读取 channel 时,生产者 goroutine 会永久阻塞,造成 goroutine 泄漏。
RunStream 本身在一个独立 goroutine 中运行 runLoop,channel 在 goroutine 退出时自动关闭:
func (e *AgentEngine) RunStream(ctx context.Context, userPrompt string) (<-chan Event, error) {
ch := make(chan Event)
go func() {
defer close(ch)
// ...
if err := e.runLoop(ctx, userPrompt, "engine-stream", em); err != nil {
ch <- Event{Type: EventError, Data: err.Error()}
return
}
ch <- Event{Type: EventDone}
}()
return ch, nil
}注意终止事件(EventDone / EventError)使用直接 ch <- 而不是 sendEvent。这是故意的——终止事件必须到达消费者,不能因为 context 取消而丢失。
引擎的状态管理:RWMutex 快照
AgentEngine 是有状态的——它持有 Session、Compactor、PlanMode 等可在运行时更新的字段。TUI 中用户可以通过 /new、/resume 命令切换会话,通过 Shift+Tab 切换 Plan Mode。
这带来了并发问题:SetSession 和 SetPlanMode 可能在 runLoop 执行过程中被 TUI goroutine 调用。
解决方案是在 runLoop 入口做一次快照:
e.mu.RLock()
sess := e.session
comp := e.compactor
planMode := e.planMode
todoStore := e.todoStore
e.mu.RUnlock()之后整个循环使用局部变量 sess、comp、planMode,不再访问 e 的字段。SetSession 的修改对当前正在运行的 runLoop 无影响,只在下一次调用时生效。
这个设计的清晰之处:锁的持有时间极短(只有读取字段的几微秒),不会与循环内的 LLM 调用(可能几秒甚至几十秒)产生锁竞争。
Plan Mode:工具层硬约束
harness9 的规划模式(Plan Mode)在工具层面实现了只读约束,而不是在 prompt 层面软约束。
var planModeWhitelist = map[string]bool{
"read_file": true,
"bash": true,
"use_skill": true,
"todo_write": true,
}
func filterReadOnlyTools(tools []schema.ToolDefinition) []schema.ToolDefinition {
var result []schema.ToolDefinition
for _, t := range tools {
if planModeWhitelist[t.Name] {
result = append(result, t)
}
}
return result
}Plan Mode 下,write_file 和 edit_file 从传给 LLM 的工具列表中被移除。LLM 在任何情况下都无法调用这两个工具——不是因为 prompt 告诉它不要用,而是因为它根本看不到这两个工具的定义。
这个区别很重要。Prompt 层软约束依赖模型遵守指令,在对话轮次增加、上下文复杂时可靠性下降。工具层硬约束是结构性的,与模型行为无关。
测试 TestRunLoop_PlanMode_FiltersWriteTools 验证了这一约束:write_file 和 edit_file 从 LLM 收到的工具列表中消失,read_file、bash、todo_write 保留。
数据模型:延迟解析的 RawMessage
schema 包定义了 harness9 的消息契约。其中一个值得关注的设计:ToolCall.Arguments 使用 json.RawMessage:
type ToolCall struct {
ID string `json:"id"`
Name string `json:"name"`
Arguments json.RawMessage `json:"arguments"` // 延迟反序列化
}LLM 返回的工具调用参数是 JSON,但每个工具的参数结构不同。用 json.RawMessage 延迟反序列化,引擎层不需要知道每个工具的参数结构——这是具体工具实现的责任。引擎只负责传递,工具自己解析。
ToolDefinition.InputSchema 同样使用 any 类型:
type ToolDefinition struct {
Name string `json:"name"`
Description string `json:"description"`
InputSchema any `json:"input_schema"` // 兼容不同 SDK 的参数格式
}OpenAI SDK 需要 shared.FunctionParameters,Anthropic SDK 需要 map[string]any。用 any 让 Provider 在自己的适配层做类型转换,引擎层对此无感知。
这两个设计的共同原则:把解析责任推到最靠近使用者的层次。
可观测性:结构化日志与 token 感知
每轮循环执行前,引擎估算当前上下文的 token 用量,在 LLM 调用后用实际值更新:
// 估算值(调用前)
msgTokensAfter := memory.EstimateTokens(compactedHistory)
toolTokens := memory.EstimateToolTokens(availableTools)
em.tokenUpdate(msgTokensAfter + toolTokens, e.contextWindow)
// 实际值(调用后,从 API response usage 字段提取)
if usage != nil && usage.InputTokens > 0 {
em.tokenUpdate(usage.InputTokens, e.contextWindow)
}TUI 状态栏根据 contextWindow 计算使用率,在接近限制时变色告警。这个双步更新(先估算、后修正)保证了 TUI 在 LLM 调用期间就能显示进度,而不是等调用完成后才更新。
阻塞模式和流式模式使用不同的日志前缀 [engine] 和 [engine-stream],便于在混合使用时区分日志来源。
设计取舍总结
harness9 的 Agent Loop 设计明确放弃了几件事:
放弃图编排,保留清晰性。 LangGraph 提供了强大的图编排能力,但 Agent 的单线程推理路径用 for 循环表达更直观。图模型的优势在多 Agent 编排,单 Agent 场景里它带来的是复杂度而非能力。
放弃外部 Loop 框架,保留控制权。 把 maxSteps 传给 Vercel AI SDK 可以少写几十行代码,但失去了在每轮之间插入自定义逻辑(压缩检查、Plan Mode 过滤、token 统计)的能力。
放弃路径冲突检测,选择无条件并发。 HermesAgent 在工具并发执行前做路径冲突检测(同一文件的读写不能并行)。harness9 不做这个检测,所有工具无条件并发。原因是 harness9 在 tools/path_locker.go 中实现了路径级读写锁,并发冲突在执行层面解决,而不是在调度层面提前检测。
这些取舍背后的共同逻辑是:用更少的代码,在正确的层次解决问题。
结语
harness9 的 Agent Loop 没有技巧,只有清晰的职责划分:emitter 封装输出差异,executeTools 封装并发执行,loadHistoryWith 封装上下文恢复,runLoop 只做调度。
一个思考留给读者:当 LLM 在一轮内同时调用 write_file 写入文件 A 和 read_file 读取同一文件 A 时,并发执行是否可能产生竞态?harness9 的 path_locker.go 是怎么处理这个问题的?
答案在 internal/tools/path_locker.go。